Automaatne aktiivne mõõtevahend
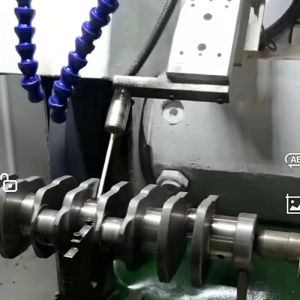
Toote rakendus
Paindliku ennustava juhtimise süsteemi rakendamine seisneb mõõtmise ja töötlemise mõõtmise kombineerimises töötlemise ajal, moodustades suletud ahelaga mõõtesüsteemi, mis juhib tööpingi töötlemisolekut ja tagab, et töötlemisjääke ei teki. Tööpingi paindlikku juhtimist saab saavutada minimaalse suletud ahelaga kontrolleriga, mis on võimeline töötlema ja töötlemisjärgselt mõõtma. Mõõtevahend arvutiga ja edasine suhtlus ülemise ja alumise masinaga võimaldab realiseerida automaatse liini üldist ühtset juhtimist. Nii saab luua ülitõhusa automaatse tootmisliini ilma töötlemisjääkideta. Lisaks saab mitmesuguste väliste objektide tuvastamiseks kasutatavate andurite abil tagada, et kogu süsteemi ei mõjuta välised tegurid.
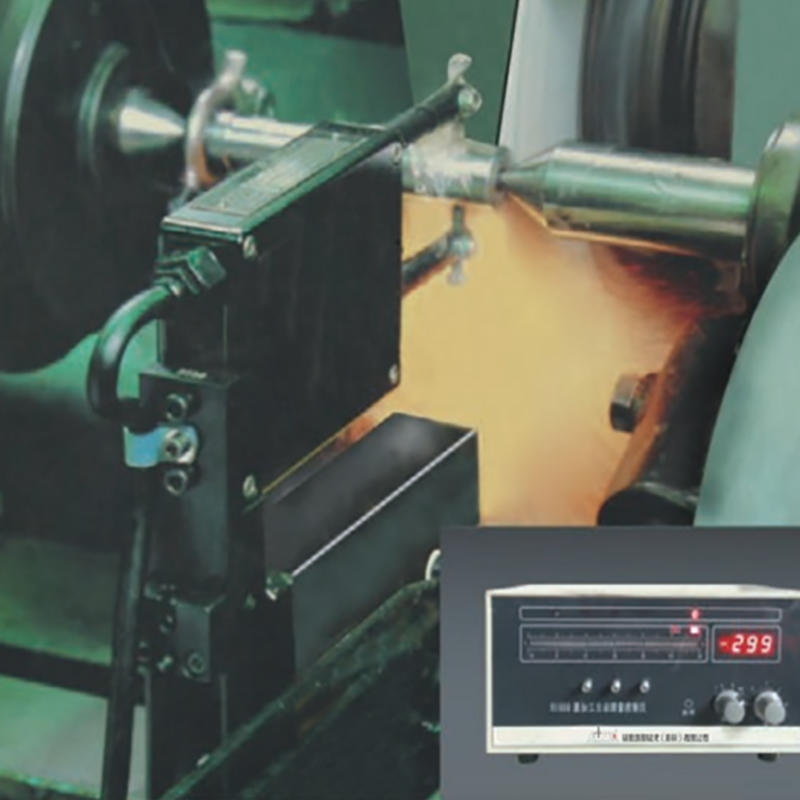
Aktiivse mõõtmise määramisprotsess Töötlemise ajal mõõdab mõõteseade töödeldavat detaili igal ajal ja sisestab mõõtmistulemused kontrollerisse. Eelnevalt seatud signaalipunktis saadab kontroller signaali tööpingi töö juhtimiseks. Näiteks lihvimisprotsessis, jämeda lihvimise etteande korral, kui kontroller annab esimese signaali, lülitub tööpink jämeda lihvimise etteandelt peenlihvimisele, kui teine signaalipunkt, lülitub tööpink peenlihvimise etteandelt kergele lihvimisele (sädemetega lihvimine puudub), kui kolmas signaalipunkt, toorik saavutab etteantud suuruse, lihvketas naaseb kiiresti ja läheb järgmise tsükli ooteolekusse.
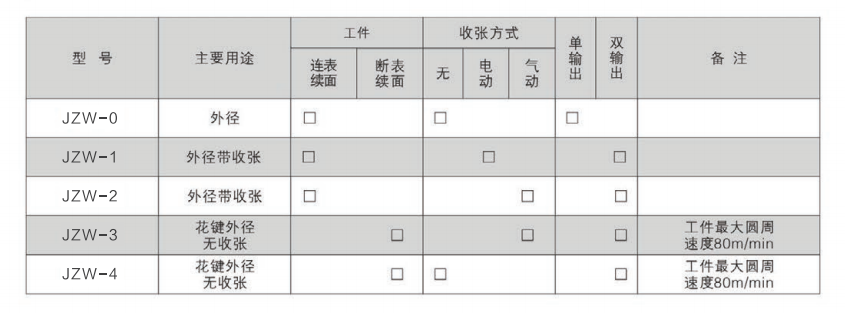
Toote parameeter
tootevideo

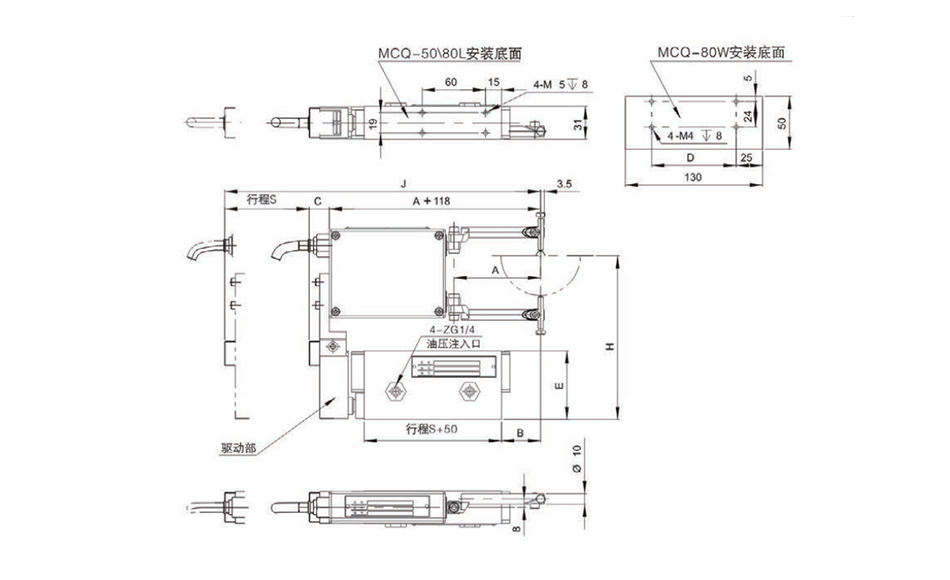
Toote suurus